Source : https://github.com/pollen-robotics/AmazingHand/
Les mains robotisées sont souvent très coûteuses et peu expressives. Les plus agiles nécessitent souvent des câbles et des actionneurs déportés dans l’avant-bras.
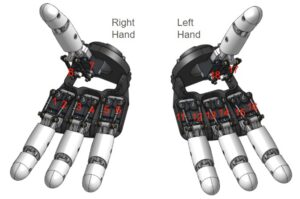
L’objectif de ce projet est d’explorer les possibilités des mains humanoïdes sur un robot réel (et Reachy2 est le candidat idéal pour cela !) à un coût modéré. => L’interface poignet est conçue pour le poignet de Reachy2 (Orbita 3D), mais elle peut facilement être adaptée à d’autres poignets de robots.